DeepLearning
DeepLearning
一、基础知识
安装环境
1 | |
1.1 Pytorch 中的梯度计算图
在 Pytorch 中自动维护了张量的计算图,用于计算梯度。其中有三种节点,分别是:
- 叶子节点
- 中间节点
- 输出节点
顾名思义,叶子节点就是最原始的输入变量。例如有如下计算过程:
1 | |
a 变量就是叶子节点,然后我们在 c 张量上执行反向传播算法:
1 | |
可以看到成功输出了梯度。值得注意的是,梯度只能存在于叶子节点中,而不能存在于中间变量中。
此外,中间节点也可以进行反向传播,但是与输出节点反向传播相比,叶子节点的梯度可能不同,归根到底是梯度计算图的路径不同。
例如:
1 | |
上面是从中间节点反向传播,梯度为 4。
1 | |
上面是从输出节点反向传播,梯度则为 32。
在一些情况下,我们可能希望计算图并不记录运算过程,例如在推理阶段。使用如下的代码即可做到。
1 | |
此外,还有另外一种做法:
1 | |
.detach()
方法可以创建一个相同但是不可导的张量,从而阻断计算图的追踪。
与 .detach() 相似的是 .detach_()
,.detach_() 对变量本身进行更改,并不创建新的张量。
具体来说,.detach_() 做两件事情:
- 设置
grad_fn为 None,这样就切断了之前的节点。 - 设置
require_grad为 False,这样当后面的节点进行反向传播时就会将其看做普通标量。
1 | |
可以看到,b2 的梯度实际上就是 b。
对于一个张量,比如 a,若 a-->b 存在,且 a-->c 存在,则 b 与 c 进行反向传播之后,张量 a 的梯度会累加,举例如下。
1 | |
可以看到,张量 c 在反向传播后,梯度其实应该是 12,但是却变成了 16。
参考:
https://www.bilibili.com/video/BV1LL41147G8?t=1.8
二、线性神经网络
2.1 线性回归
2.1.1 基础知识
线性模型有一个 n 维的权重和一个标量偏移,输出是输入的加权和,即
衡量预测值好坏:
由于有权重的只有一层,因此线性回归可以看作是单层神经网络。
2.1.2 基础优化算法
梯度下降算法:
但是如果数据集规模太大,整体计算一遍才能进行一次优化过程,效率很低,因此就诞生了小批量梯度下降。即从整体数据中取出一个小批量 mini-batch,然后在这个小批量上计算梯度。
设一个 mini-batch 的样本数为 b, 则损失为:
2.2 Softmax回归
2.2.1 基础知识
Softmax实际是分类问题
独热编码:
将预测值转换为概率
exp是为了让负数转换为正数
如何衡量两个概率的区别呢?-->交叉熵
则损失函数如下,可以看出只关心真实类别对应的概率
2.2.2 损失函数
L2Loss:均方损失
L1Loss:绝对值损失
Huber's Robust Loss
四、多层感知机
4.1 感知机
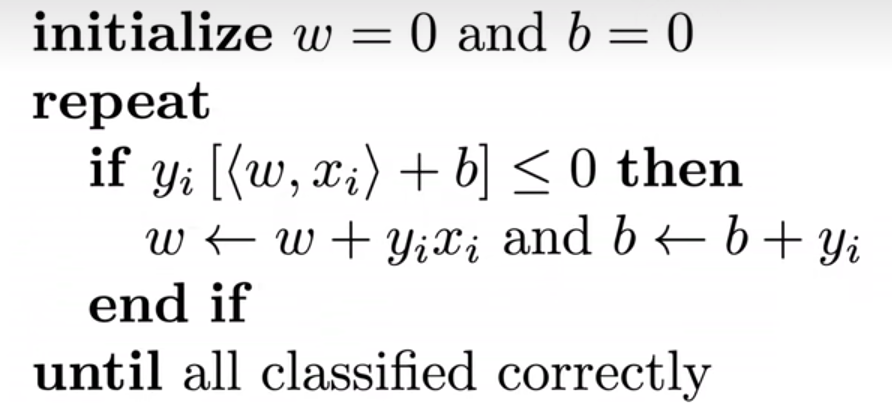
等价于批量大小为 1 的梯度下降,并使用如下的损失函数:
感知机有什么问题:感知机只能产生线性分割面
小结:
- 感知机是一个二分类模型,是最早的AI模型之一
- 求解算法等价于使用批量大小为1的梯度下降
- 不能拟合XOR 函数
4.2 多层感知机

为什么需要激活函数:
可以看到,最终的效果是和单层感知机相同的,因此需要加入非线性的激活函数,也就是
Sigmoid激活函数:

Tanh激活函数:

ReLu激活函数:

4.3 模型选择
训练误差: 模型在训练数据上的误差
泛化误差:模型在新数据上的误差
验证数据集:一个用来评估模型好坏的数据集
测试数据集: 只用一次的数据集,比如未来才会得到的数据集
若数据不多,则可以使用K-折交叉验证的方法:将训练数据分为k块,对于i从0到k-1,每次取第i块为验证数据集,其余为训练数据集,误差取k个验证集的平均,通常k=5或10
4.4 过拟合和欠拟合
| 模型容量 | 简单 | 复杂 |
|---|---|---|
| 低 | 正常 | 欠拟合 |
| 高 | 过拟合 | 正常 |

可以看到当模型复杂度过高,模型会过于关注一些无关紧要的噪声
那么如何估计模型容量呢?
- 在不同种类的算法之间,比如树模型和神经网络,难以比较
- 但如果给定了一个模型种类,将有两个主要因素
- 参数的个数
- 参数值的选择范围
数据复杂度:
- 样本个数
- 每个样本的元素个数
- 时间、空间结构
- 多样性
4.5 权重衰退
定义:是用来处理过拟合的一种方法
- 使用均方范数作为硬性限制:
通过限制参数值的选择范围来控制模型容量:
通常不会限制 b
- 使用均方范数作为柔性限制:
对于每个
若
通常
实现:
1 | |
4.6 丢弃法
丢弃法也是解决过拟合的有效方法之一
丢弃法对每个元素进行如下扰动:
正则项只在训练中使用,但在推理过程中不使用,这样能保证确定的输出
4.7 数值稳定性
梯度爆炸的问题:
- 值超过值域
- 对学习率敏感:我们可能需要在训练过程中不断调整学习率
梯度消失的问题:
- 梯度值变成0
- 训练没有进展
- 无法让神经网络更深
如何让训练更加稳定:
- 将乘法变加法
- 梯度归一化
- 梯度裁剪
- 合理的权重初始化和激活函数
在训练刚开始的时候更容易有数值不稳定。因此,如何初始化才能让数值比较稳定呢?
下面讲解 Xavier 初始化。
对于i层神经元的输出,有
因此有
同理,对于反向传播
因此
因此有正态分布初始化
均匀分布初始化
上面的公式需要假设
, - 激活函数
对称且 - X 的方差相同
参考:
- https://www.bilibili.com/video/BV1tq4y1K7Kk?t=709.7
- https://www.bilibili.com/video/BV1PF411K7nb?t=2.1
五、卷积神经网络
5.1 卷积层
输入X:
核W:
输出Y:
5.2 填充和步幅
为什么需要填充?卷积核可以减小输出大小。
假设填充
通常取
- 当
为奇数,上下各填充 - 当
为偶数,上侧填充 ,下侧填充
步幅的作用:加快减小输出的大小
5.3 多输入输出通道
如果有多个输入通道,比如RGB有3个通道,则每个通道都有一个卷积核,结果是所有通道卷积结果的和。
多输出通道:可以有多个三维卷积核
5.4 池化层
池化层用来降低后续层的输入维度,缩减模型大小,提高计算速度,防止过拟合。
主要分为两种:
- 最大池化
- 平均池化
5.5 LeNet
LeNet 在 1989 年提出,是最早提出的卷积神经网络之一,先使用卷积层学习图片的空间信息,然后使用全连接层转换到类别空间。

从图中可以看到,LeNet 主要分成两部分,一个是卷积层,一个是全连接层。在卷积层,首先经过一个 6 通道的卷积,再经过一个池化层;然后经过 16 通道的卷积,最后通过一个池化层;然后就进入全连接层进行分类。
5.6 AlexNet
AlexNet 在 2012 年被提出,可以看做是更深更大的 LeNet。

上图中左侧为 LeNet,右侧为 AlexNet。
改进点:
- 新增了 Dropout
- 激活函数从Sigmoid 变为 ReLu
- 池化层从平均池化变为最大池化
5.7 使用块的网络VGG
AlexNet 的效果很好,但是很多层设计的过于随意。为了设计新的网络,有没有办法寻找一种模板呢?这就引出了 VGG。

从图中可以看出,VGG 可以看做是对 AlexNet 的一种抽象和封装,使之更加模块化。在一个 VGG 块中,首先是 n 层的 3*3 卷积,pad 为 1,然后是一个 2*2 的最大池化层。值得注意的是,VGG 的提出者也曾使用了 5*5 的卷积,但是他们发现,更小的卷积核+更多的层数往往效果比更大的卷积核+更少的层数好。
5.8 网络中的网络 NiN
无论是 AlexNet 还是 VGG,都有全连接层的存在。这样有两个缺点存在。一个是全连接层的参数数目过多,训练过于昂贵。另外就是使用全连接层可能会完全放弃表征的空间结构。因此 NiN 被提出,放弃了全连接层而全部使用卷积层。

从图中可以看出,一个 NiN 块由 3 部分组成,分别是一个卷积层和两个 1*1 的卷积层。实际上可以看做是另一种形式的全连接。几个 1*1 的卷积层可以用来融合通道。最后,通过全局平均汇聚层获取输出结果。
5.9 GoogLeNet
GoogLeNet 吸收了 NiN 中 1*1 卷积的思想,在此基础上进行了改进。在之前的网络中,总是纠结于选择什么样的卷积核。然而 GoogLeNet 告诉我们,可以全部选择,并行计算。
例如,下面是一个 Inception-v1 块:

最终的输入和输出的高宽是相同的,不同的只是通道数。前面 3 条路径分别从不同大小的卷积核上提取信息。中间的两条 1*1 卷积用于降低通道数,从而减小模型复杂性。最后一条路径也是用来改变通道数。在 Inception 块中,我们通常需要调整的超参是每层的输出通道数。

上图就是 GoogLeNet 的网络架构,使用了不同的 Inception 块。
后来的研究者对 Inception 块进行了不同程度的改进,诞生了 Inception-v2 (添加了 batch-normalization),Inception-v3 (替换一些卷积层),Inception-v4 (使用残差连接)。
5.10 批量归一化
为什么需要进行批量归一化?距离来说,对于一个比较深层的网络,越接近输出层的位置梯度越大,也越容易收敛。但是越接近输入层的网络梯度越小,收敛也就越慢。实际上,低层网络往往更加重要,因为底层网络可以细致的学习各种特征,而高层网络可以看做将这些低层网络学习到的特征进行组合。因此,当底层网络变化时,高层网络也需要重新训练。归根到底,是由于层与层之间的数据分布不同。那么,我们有没有一种方法,使得层与层之间的数据分布都比较稳定,从而快速收敛呢?
在上面的批量归一化公式中,
对于全连接层,归一化是作用在特征维上的,也就是每一列单独计算。而对于卷积层,则是作用在通道维上的。也就是横向来看,每个像素对应的位置可能对应着多个通道,把这些通道看做小批量,然后进行归一化。
总体上看,批量归一化可以加速收敛速度,但是一般不改变模型精度。
5.11 残差网络ResNet
残差网络可以看做卷积网络中最重要的一种网络,其设计思想能够实现真正意义上的深层神经网络。下面我们首先来理解提出 ResNet 的直觉。

如上图,左侧为我们传统的训练模型。每一个函数可以看做是网络的一层。随着层数的加深,在前期我们确实逐步逼近了最终的真实值。但是随着层数的增加,我们可以看到,网络似乎"学歪了",反而离真实值越来越远。右侧是我们的残差网络,可以看到,随着层数的加深,似乎有一种定力一直让我们的网络"保持初心"。下面,我们介绍这种"定力"究竟是什么。
 如上图,残差网络的设计思想就是,在输入到一块训练网络时,将自己复制一份,直接和最终的输出相加。如果输入与输出的通道数不同,就需要我们的
1*1 卷积层进行通道融合。但是输入与输出的高宽必须保持相同。
如上图,残差网络的设计思想就是,在输入到一块训练网络时,将自己复制一份,直接和最终的输出相加。如果输入与输出的通道数不同,就需要我们的
1*1 卷积层进行通道融合。但是输入与输出的高宽必须保持相同。
为什么这种设计能帮助我们实现更深的网络?
假设我们需要拟合

上图为 ResNet-18 的架构图 (卷积层和全连接层一共 18 个)
六、数据降维
5.1 PCA
https://www.bilibili.com/video/BV1Fe41157Tw?t=42.7
https://www.bilibili.com/video/BV1FT4y1E74V?t=209.4&p=88
二分分类:
设
https://www.bilibili.com/video/BV1FT4y1E74V?t=6.5&p=170
https://www.bilibili.com/video/BV1Y5411c7aY?t=357.2&p=2
https://www.bilibili.com/video/BV1Yr4y1k72C?t=119.7
七、NLP
7.1 读取长序列数据
在一本书中,有成千上万个无规则的单词,前面我们利用自定义类
Vocab 将每个 Token 转化为对应的数值,那么我们如何得到每个
batch 的训练数据呢。
例如,从一本书中提取的 Token 如下:
1 | |
为了简化起见,我们假设序列经过精简后如下:
1 | |
我们面临的第一个问题是,从哪里开始划分。如果每次从固定的位置划分,如:
1 | |
则有些序列永远不会被训练,如
1 | |
因此,我们可以每次随机截取开头:
1 | |
现在我们成功划分得到了各种不同的句子,那么如何将其组成一个的 Batch 呢?有两种方法,分别是随机采样和顺序分区。
7.1.1 随机采样
| Batch 1 | Batch 2 | ... |
|---|---|---|
| Seq 4 | Seq 33 | ... |
| Seq 17 | Seq 49 | ... |
可以看到,在两个 Batch 之间,句子是没有关系的。这也就是随机采样。
7.1.2 顺序分区
| Batch 1 | Batch 2 | ... |
|---|---|---|
| Seq 4 | Seq 5 | ... |
| Seq 17 | Seq 18 | ... |
与随机采样不同,顺序分区在相邻的 Batch 之间的相同位置上语句是连贯的。
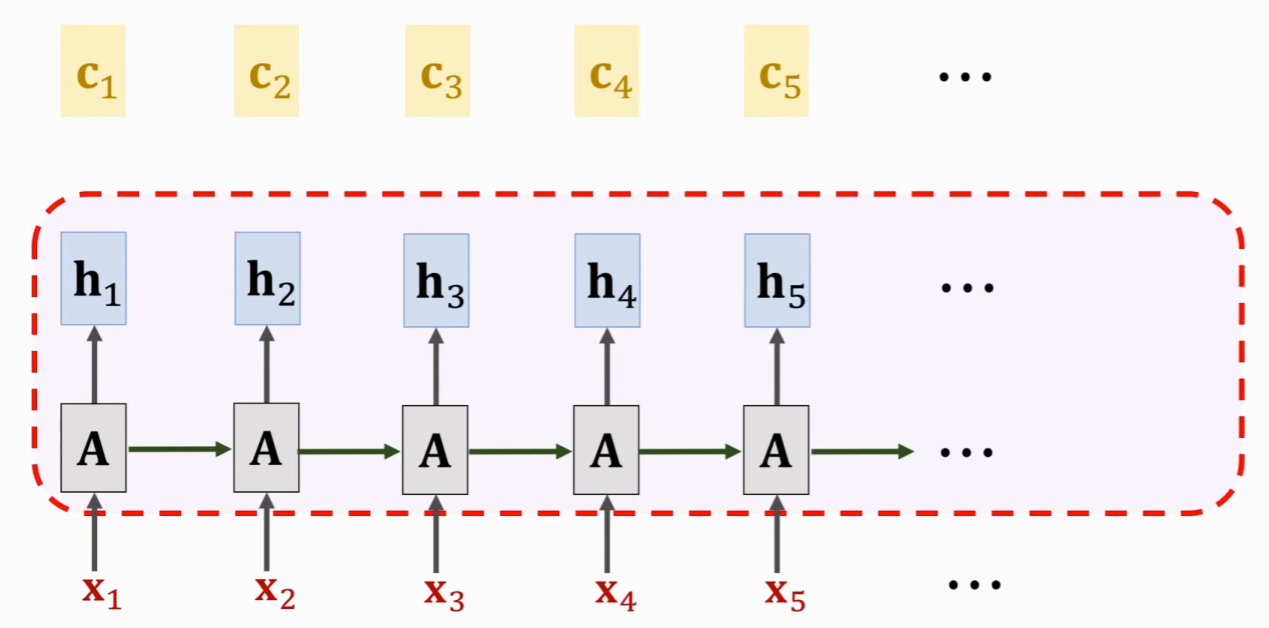
7.1 循环神经网络 RNN
要理解 RNN,关键是懂得模型的输入与输出。
例如,下面的代码是一个 RNN 的模型定义:
1 | |
假设输入的 inputs 如下 (不考虑 one-hot 编码):
1 | |
那么一个 batch 就含有 2 条语句,每个语句的时间步长是 5。
函数的 state 是外部输入的,有可能是全为 0 的张量 (例如随机采样),也有可能是不为 0,比如顺序分区得到的数据,每一个 batch 与之前的 batch 是存在联系的。
在 rnn 函数里,我们可以当做数据是按列进行扫描的。每一列的时间步长的状态相同,没走过一列,就得到一列的输出。即最后的 out 为:
1 | |
模型的预测:
1 | |
如图为预测阶段的代码。总体上看可以分成两部分。第一部分是预热,也就是初始化
state 变量。在预热期我们不用关注预测结果,因为我们的目的只是初始化
state。get_input() 函数用于选取 outputs
中的最后一个结果。
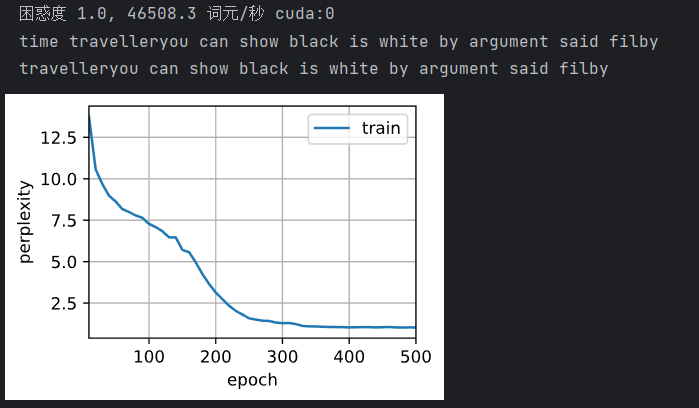
可以看到,虽然困惑度较低,但是实际的效果并不好。
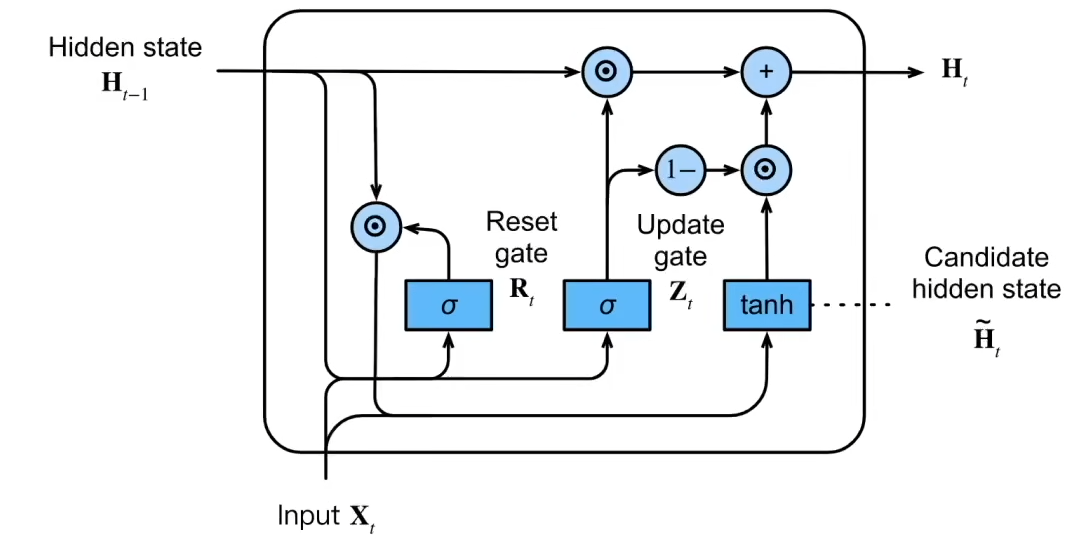
7.2 门控循环单元GRU
为什么RNN在长序列上效果较差:随着序列的加长,在隐层状态中累计了太多的信息。
值得注意的是,在一个序列中,并不是每个观察值都同等重要。而GRU能够帮助隐层状态有选择的记忆(与后文的注意力机制相近)。
GRU中有两种门:
- 更新门:在计算隐层状态时,t-1时刻的隐层信息要用到多少
- 重置门:在更新候选隐层状态时要用到多少过去的信息
激活函数一般是sigmoid,因此取值在0与1之间
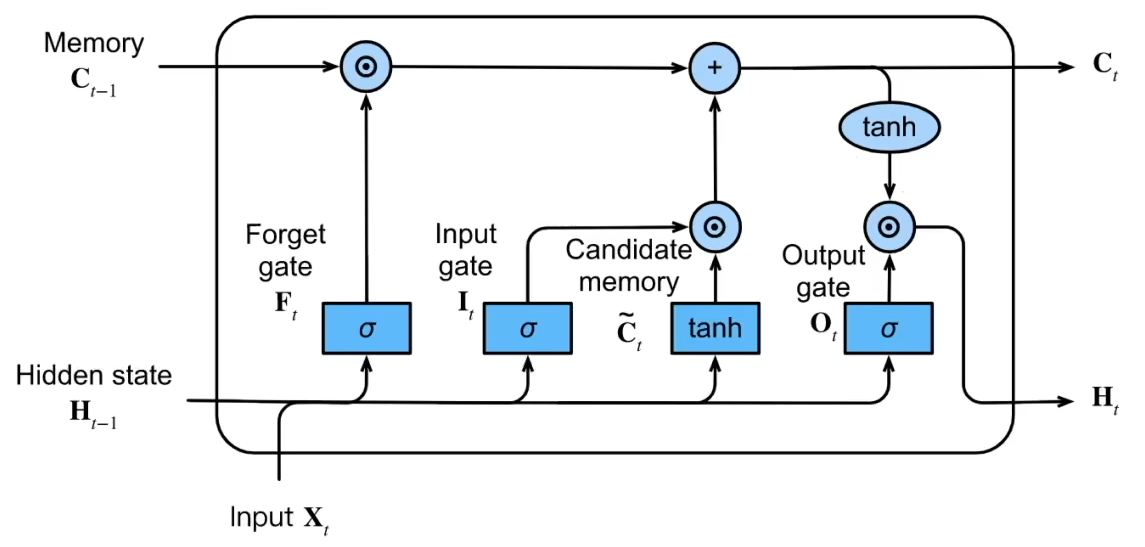
### 7.3 长短期记忆网络LSTM
LSTM有3种网络:
- 忘记门:选择遗忘掉多少信息
- 输入门:选择吸纳多少新信息
- 输出门:选择当前时间步中的重要信息
候选记忆单元:
参考:
https://www.bilibili.com/video/BV1yb4y1T7LR?t=613.6&p=3
7.4 深层循环神经网络
7.5 双向循环神经网络
处于未来的信息也有可能很重要,比如
I am ___ hungry, I could eat half a pig.
在划线处只能填写very而不是not
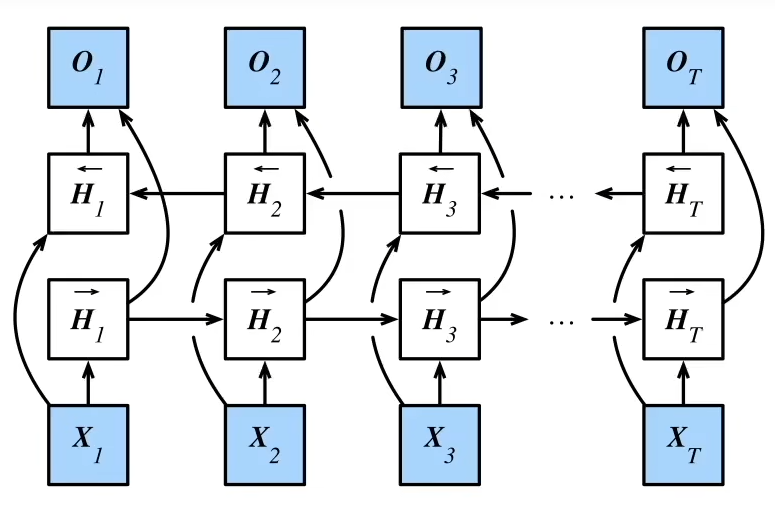
双向循环神经网络有一个特点:几乎无法推理。因为推理既需要过去的信息,又需要未来的信息。因此双向循环神经网络的主要应用是对句子进行特征提取。
7.6 机器翻译数据集
在学习机器翻译之前,我们首先需要对数据集进行处理 (注意需要考虑哪些因素)。可以分成下面几个步骤:
Step 1:对数据集进行简单的整理,如将全半角空格进行统一,将大写字母统一替换为小写字母,在标点前加上空格 (这样的话标点可以成为一个 token)。
1 | |
Step 2:将数据集进行词元化,即生成如下的格式:
1 | |
具体代码如下:
1 | |
Step 3:生成词汇表,即 id2word,word2id
1 | |
Step 4:进行截断或填充
1 | |
可以看到,这里用到了词汇表,Vocab 类中的
__getitem__ 方法可以很方便的将 Token 转化为索引。
Step 5:获取迭代器
1 | |
综上,对于 NLP 相关的数据处理,大体上可以分为 5 步:数据规整 (大小写,空格),词元化,词汇表构建,填充和截断,获取迭代器。
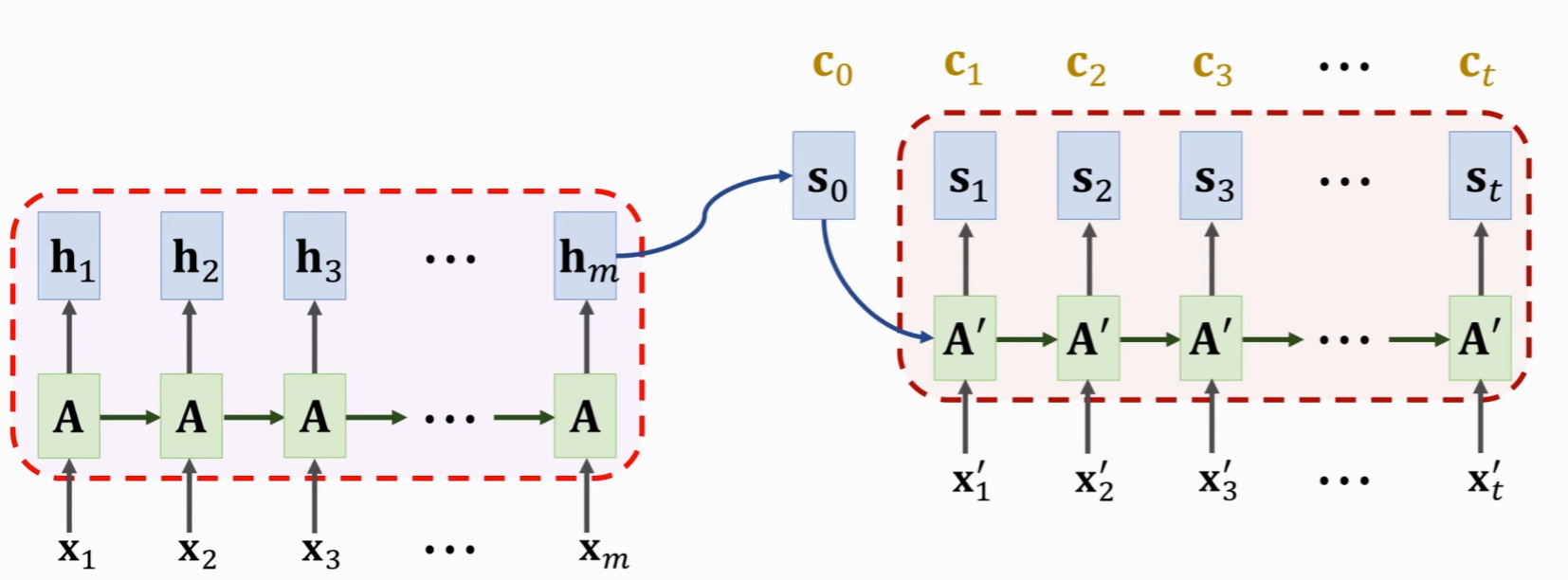
7.7 编码器和解码器
在机器翻译中,输入和输出都是可变长序列,但是在之前的 RNN 中,我们的句子长度都是固定的。那么有没有方法可以让我们处理可变长序列呢?这就引出了我们的编码器和解码器架构。

可以看到,输入和输出其实都可以处理变长序列,可以看做两个 RNN。
7.8 Seq2Seq
Seq2Seq 也就是语句到语句,利用了前文的编码器和解码器架构。编码器这一侧,主要使用了嵌入层和 RNN 层。不需要全连接层,只需要把隐藏层的状态进行输出即可。
1 | |
在解码器这一侧,需要将编码器的最后时刻的隐状态 (batch_size * num_hiddens) 复制时间步长份,然后将输入与隐状态进行拼接,再放入到 RNN 中。
1 | |
预测序列评估指标:Blue
从公式中可以看到,Blue 综合了长短序列。若输出较短,则左侧部分会很小。若输出序列较长,虽然概率会比较小,但是其指数也比较小,因此右侧部分会比较大。Blue 指标越大越好。
7.9 束搜索
前面我们预测某一个时间步的输出时,往往需要选择概率最大的单词。但是,局部最优不一定全局最优。0.5 * 0.4 = 0.2 但是 0.4 * 0.9 = 0.36。即若我们选择概率比较小的 0.4,下一刻可能会遇到概率比较大的 0.9。因此,为了全局最优,我们引出了束搜索。
值得一提的是,束搜索虽然不能实现全局最优,但是能够在局部最优和全局最优之间做一个平衡。

综上,有超参数 k,在第一步选取最优的 k 个单词,往后在这 k 个序列中,此后都是正常的贪心算法,不再递归执行束搜索。
那么,最终得到的 k 个序列,如何评估哪个序列最好呢?
一般来说,参数
7.10 注意力机制
7.10.1 注意力机制的概念
当我们随意漫游在一间屋子中,往往会被屋子中最突出的物品吸引,这就是不随意线索 (不随意识的线索)。然而,如果我们此刻想在屋子中寻找一本书,那么自然而然的我们会更加关注书本,这就是随意线索 (有主观意识的搜索)。那么,我们如何将这种思想引入到深度学习领域呢?
假设我们现在有很多 key-value 对,有一个新的键 query,现在需要根据 query 计算对应的值。自然的,如果 key-value 对中有与 query 相同的键,我们就可以直接输出对应的值。但是如果没有呢?我们需要对各个 value 取平均吗?这不是一个好的想法,因为不同的 key-value 值得我们注意的重要性并不同。
符合直接的做法是,如果一个 key 与我们的 query 相似,也就是注意力分数高,我们就对其对应的 value 赋予更高的注意力。我们对每一个 key 都计算一个注意力分数,然后经过 softmax 归一化,最后对 value 加权求和,不就得到我们想要的值了吗?
观察上面的数学表达,其中
若
则经过化简后可以类似 Softmax,只不过对输入进行了变换。
计算结果:
 显然,这种方法不需要经过训练,没有学习的参数。最终的结果并不太好。
显然,这种方法不需要经过训练,没有学习的参数。最终的结果并不太好。

通过注意力的热力图我们可以看到,这种方法的注意力过于分散。
接下来,我们引出可以经过学习的参数,即:
经过训练后,得到了如下的拟合效果:
 可以看到,拟合效果明显更好。
可以看到,拟合效果明显更好。

而从注意力的热力图可以看到,注意力更加集中,也就是每一个输入的数据,更加关注周围的数据。
而这种思想其实可以很好的用在 Seq2Seq 模型中。因为在使用注意力机制以前,解码器使用的是编码器的最后一层的最后一个时间步长的隐层状态。但是当句子很长的时候,这个隐状态不一定能保存句子的所有信息。
7.10.2 注意力分数
前面我们使用了高斯核来进行建模。试试上其指数部分可以看做注意力评分函数。也就是我们的 query 和 key 的相似程度。接下来我们介绍两种注意力平分函数。
首先是加性注意力。
当 key,value,query 各自的维度不同,例如:
设参数:
其中参数
然后是缩放点积注意力。
如果能够直接点积的话效率自然会提高不少,但是这种方法要求 query 和 key 的维度相同 (例如都为 d)。
7.10.3 注意力机制与 Seq2Seq
前文的 Seq2Seq 模型中,我们对于解码器的输入,应用的是输入 x
与编码器的隐状态的拼接。然而,引入了注意力机制后,与 x
拼接的变成了上下文状态
而关于权重的计算有很多方法,可以自行选择。
注意,对于状态 s,可以去除,只让输入 x 与上下文变量 c 进行 concat。
7.11 自注意力机制
7.11.1 原理
前面的注意力机制应用在两个 RNN 上面,其中的 key、query、value 各不相同。然而,在自注意力机制中,key 、query 和 value 都是相同的。即:
因此,自注意力机制可以实现并行计算。
但是,虽然可以并行计算,却没有位置信息,也就是对于自注意力层来说,每个位置都没有区别。下面,我们讲解如何加入位置信息。
对于第 i 个时间步的单词对应的词向量,第 j 列对应的偏移:
假设 i 不变,则对于词向量的奇数列和偶数列,偏移分别使用 sin 和 cos。
7.11.2 自注意力机制与 Seq2Seq
Self-Attention 是应用在单 RNN 上面的,而 Attention 应用在两个 RNN 上面。
对于传统的 RNN,隐层状态更新如下:
而对于使用自注意力机制的 RNN,则隐层状态更新如下:
其中
7.11.3 发展历史
注意力机制:2015,Neural machine translation by jointly learning to align and translate
自注意力机制:2016,Long short-term memory-networks for machine reading
7.12 Transformer 模型
Transforer 只有全连接层和注意力层,并没有 RNN。目前主流的机器翻译往往使用 Transformer 模型+BERT。
Transformer 使用了编码器和解码器的架构。
7.11.1 Attention
7.11.2 Self-Attention