PreciseCache
Paper:PreciseCache Precise Feature Caching for Efficient and High-fidelity Video Generation,ICLR 2026
解决的核心问题:DiT 加速。
以往的统一缓存或自适应缓存机制无法准确识别真正的“冗余特征”,导致误跳过了重要特征的计算,
论文提出了一个名为 PreciseCache 的即插即用、无需训练的加速框架 。它从 Step-wise 和 Block-wise 两个空间粒度,精准检测并剔除真正冗余的计算。
核心方案
创新点一:时域自适应缓存 LFCache
在去噪过程中,高噪声阶段主要决定视频的“底层结构和轮廓”(低频信息,极其重要,不能跳过),而低噪声阶段只负责修饰“感知不明显的细节”(高频信息,可安全跳过)
利用快速傅里叶变换(FFT)提取模型预测特征
的低频分量 : 定义低频差异(Low-Frequency Difference, LFD)来衡量相邻时间步之间结构信息的改变程度:
在实际推理中,如果累加的低频误差
直接计算
创新点二:网络块级别自适应缓存
直觉:即使某些时间步不能被整体跳过,DiT 内部包含几十个 Transformer Block,并不是每一个 Block 在这一步都做出了很大贡献 。有些 Block 的输入和输出几乎没变,它们的计算同样可以被跳过。
在无法跳过的完整推理步
算出所有 Block 的差值后,对它们求
- 如果是核心块(在 Top
里面):保持正常计算,让特征老老实实地过一遍这个 Block。 - 如果是非核心块:
核心思想:那些在第
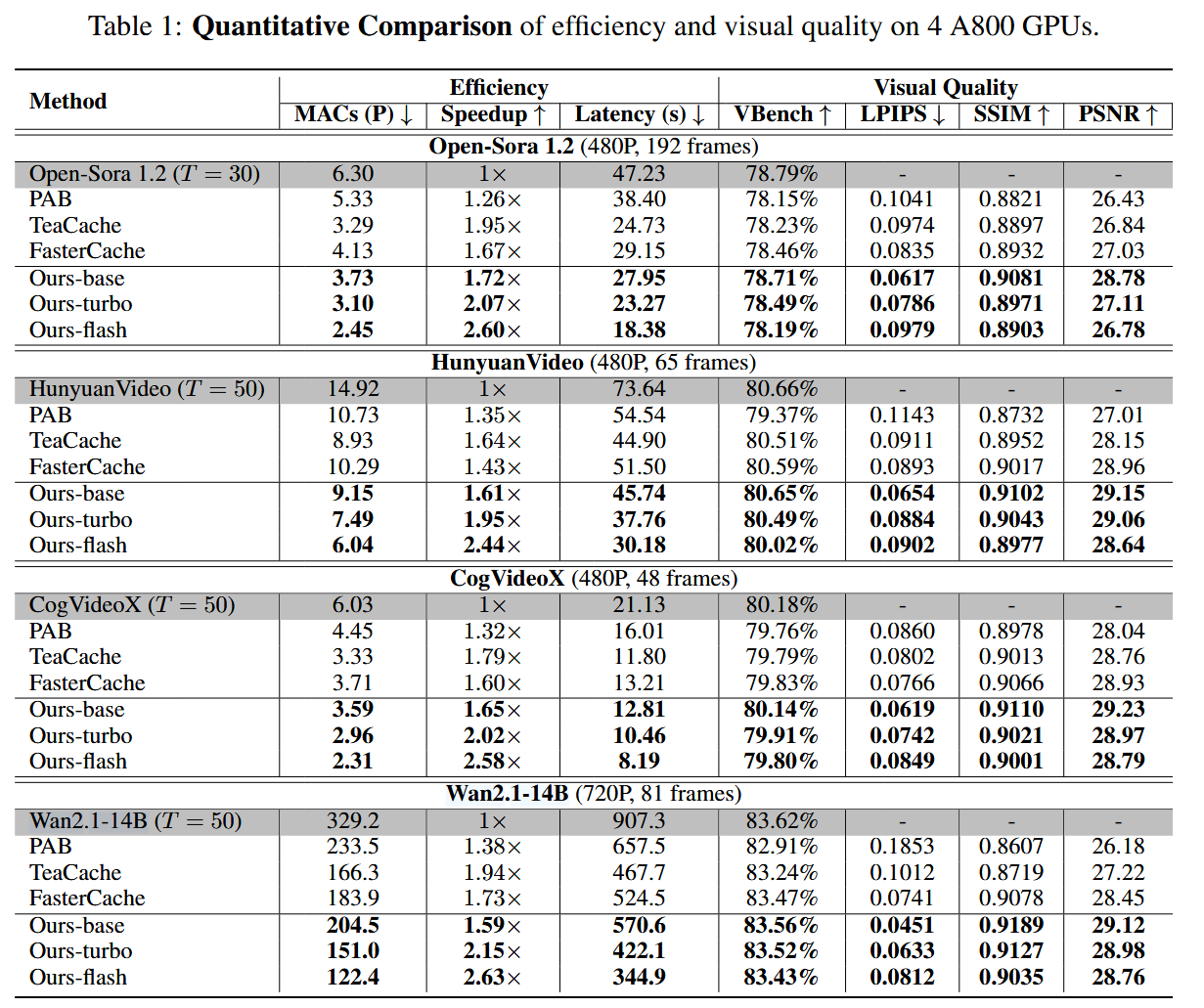
实验效果: